Looks like the Raspberry Pi foundation has hit the 5 Million mile stone.
http://www.raspberrypi.org/five-million-sold/
If you in Torbay or South Devon (or even beyond) the next Torbay Pi jam is 14th March
http://www.dcglug.org.uk/torbay-pi-jam/
Lets see what people are doing with their Pi’s (or similar devices)
At the Raspberry Pi Jam on Saturday the 14th I was working on creating a cluster supercomputer with a piece of software, GNU Parallel. It was successful, and I did a test with the prime number generator Paul made. It seems to require me to copy all files involved to all computers involved. However, it appears around 40% faster when using two computers instead of just one.
It appears that GNU Parallel has trouble finding the amount of cores on each computer, which is likely the reason for Paul’s inital results, which showed not using parallel to be faster. For all computers it says ‘Could not find the amount of cpu’s on 192.168.1.x, using 1’. It is possible to specify to parallel how many cores computers have, so I will research this.
At Minecraft club on Wednesday, we attempted to link Parkfield’s netbooks together with their switch. We discovered something extremely odd; the Linux netbooks there, along with one of the laptops from Raspberry Pi jams, do not have OpenSSH Server (sshd) installed, even though it is meant to be installed by default on Linux. One of the netbooks wouldn’t let us install it either, but that didn’t really matter – it just meant we had to use parallel on that machine instead of another. We didn’t get time to run a test, but we should have time next Wednesday.
Although so far we have just used GNU Parallel with a python program, it can be extremely useful. For example if you have a password-protected archive with important files, but you forgot the password, you can decrypt the folder much quicker with more processing power.
The Torbay Pi jams have had a mention on the Torbay CDT website
http://www.torbaycdt.org.uk/index.php/events
So a big thank you to them for this. Please re-tweet so we can spread the word on the PI jam and the work of the Torbay CDT.
Devon and Cornwall GNU / LInux user group North Devon Meet up
Saturday 21st Feb 2015 @ 14;00
Place, The White Hart,, Holsworthy, Devon
Monthly meet up for members of the Devon and Cornwall GNU / Linux user group or anyone in the area who is interested in a social meetup. Grab a drink and have a chat about free software, Linux, tech or what ever comes up.
The unfortunate grove socket incident with the motor shield / gove breakout means I have to wait for new cables / connectors to arrive before I can look at adding sensors. First priority will be line following an “old classic” for robots and frankly pi + arduino + motor shield is probably over kill for this, but then again I am trying to squeeze as much functionality into a single robot as “robotically” possible.
While I “wait” … I have swapped out the Pi B for my only Pi B+ board so that I now have 4 USB ports (without needing to clutter the already busy platform with more hardware like a USB hub). Now I can have WiFi dongle, coms link from Pi to Arduino and Webcam input, and still have one USB port free for what ever evil genuis plan takes root in my brain.
So now I can use the upgraded python scripted http server / robot controller (glorified serial coms down USB port) to control robot from any web browser (that supports javascript) on any device that can connect via the wifi hotspot (hosted on the robot’s Pi B+ board). Although the webcam is mounted upside down, I have managed to flip the picture using pygame.transform library (yes that’s right I’m using pygame libraries in a robot!), it only displays snapshots (usually after processing a command eg forward, reverse, left, right, stop). Next tasklet is to get this streaming a constant flow of updated images, I dare not call it video streaming as there seems to be a bottleneck in the processing somewhere, so http page refreshes are very slow (something else to work on).
I have also ordered some similar motors / wheels for a new build project which will be the upsizing of the previous frapper bot project, so for those that have seen it before a marco sized frapper bot type design using spare bits of foamex board for the platform. Unlike Marco’s motors the new “kit” comes with 8 pole magnet “hubs” and “hall effect” sensors which will allow me to control and regulate the speed of the individual motors. At the moment Marco turns to the left when going forward because the right motor is going faster than the left even when setting them at the same speed. Even if I manually trim this, as the batteries drain so the trimming comes out of alignment again, so some form of control algorithm is required. The Hall sensors will detect 8 changes in the polarity of the hub as the shaft it is attached to spins around 1 revolution, thus being able to determin both speed and distance of the individual motors. The trick is to use that information to regulate speed, and recognise a stall situation.
I would like to say that I had to work really hard to get the webcam version of the web based control system working, but I had actually already tested this on my PC prior to replacing the B with the B+. I only had to make a minor tweak to the PC version (the image flipping mentioned above) to accomodate the fact that I had to mount the camera upside down. This is really one of those times where you make up for hardware issues with “smart” software.
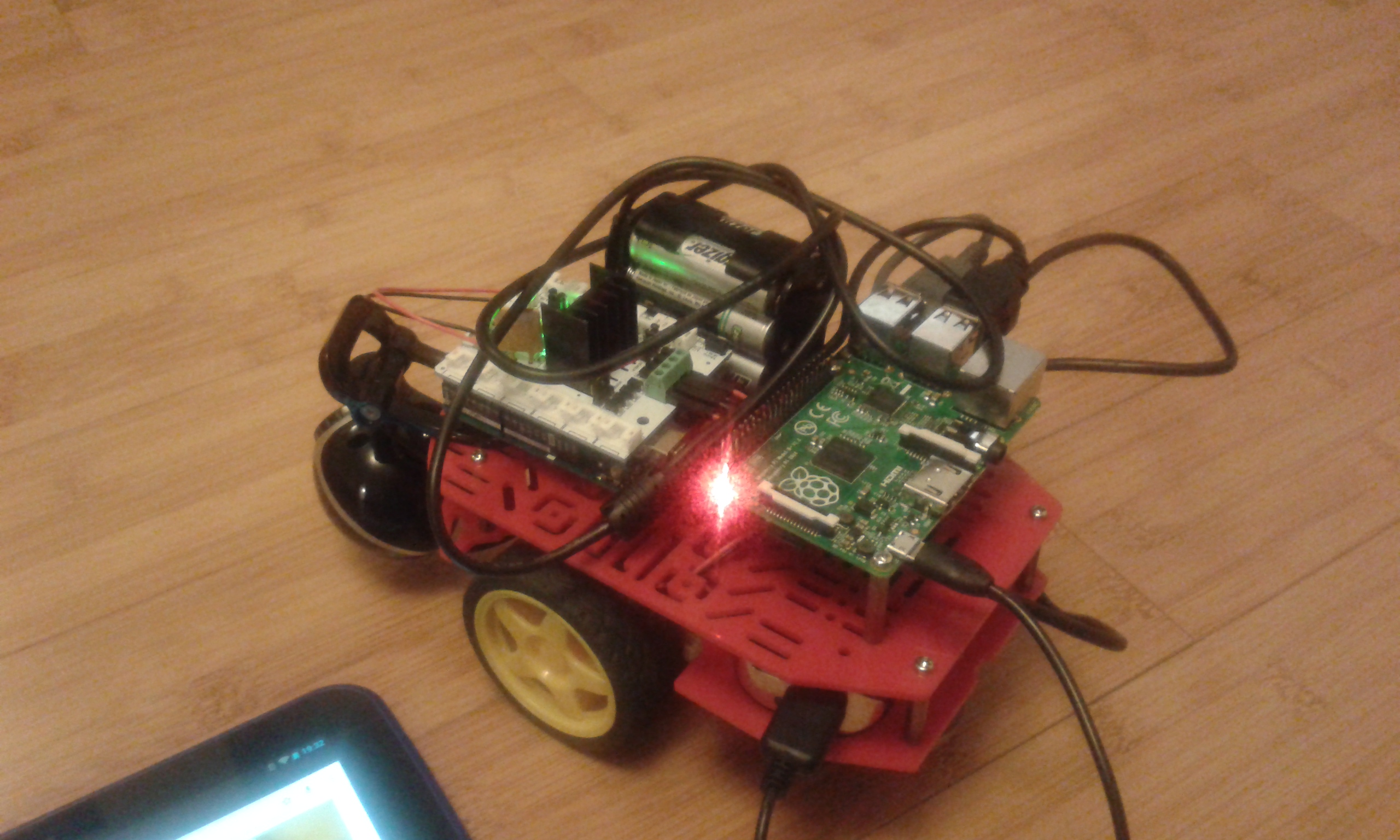
Enough talking !!! Now for some Marco 2 pictures:
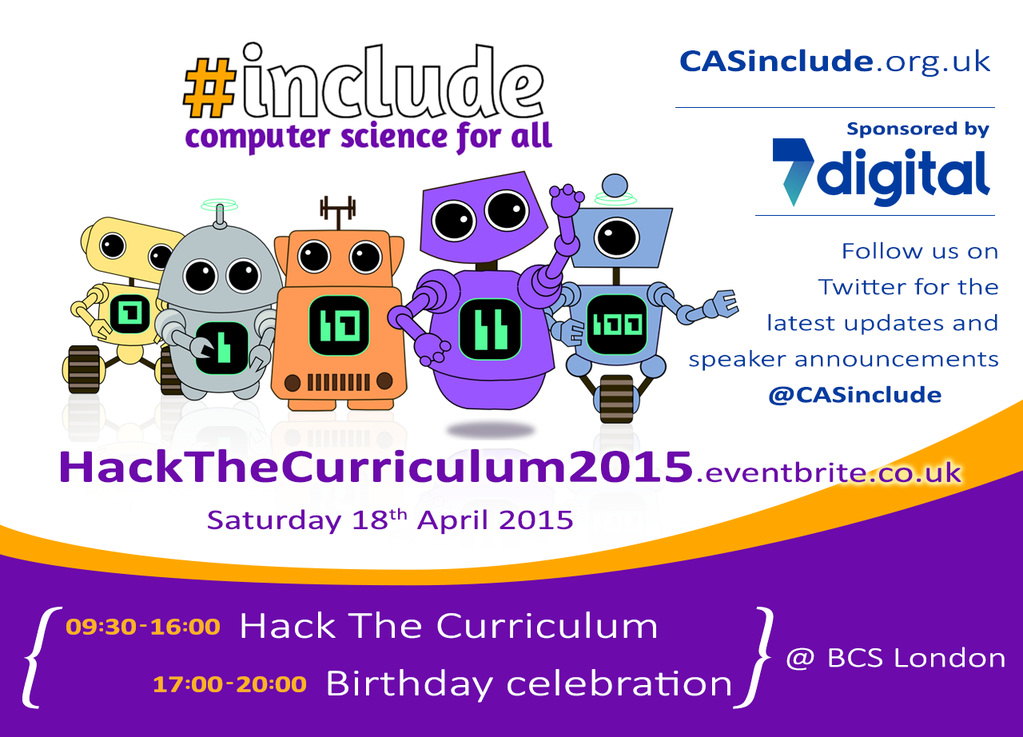
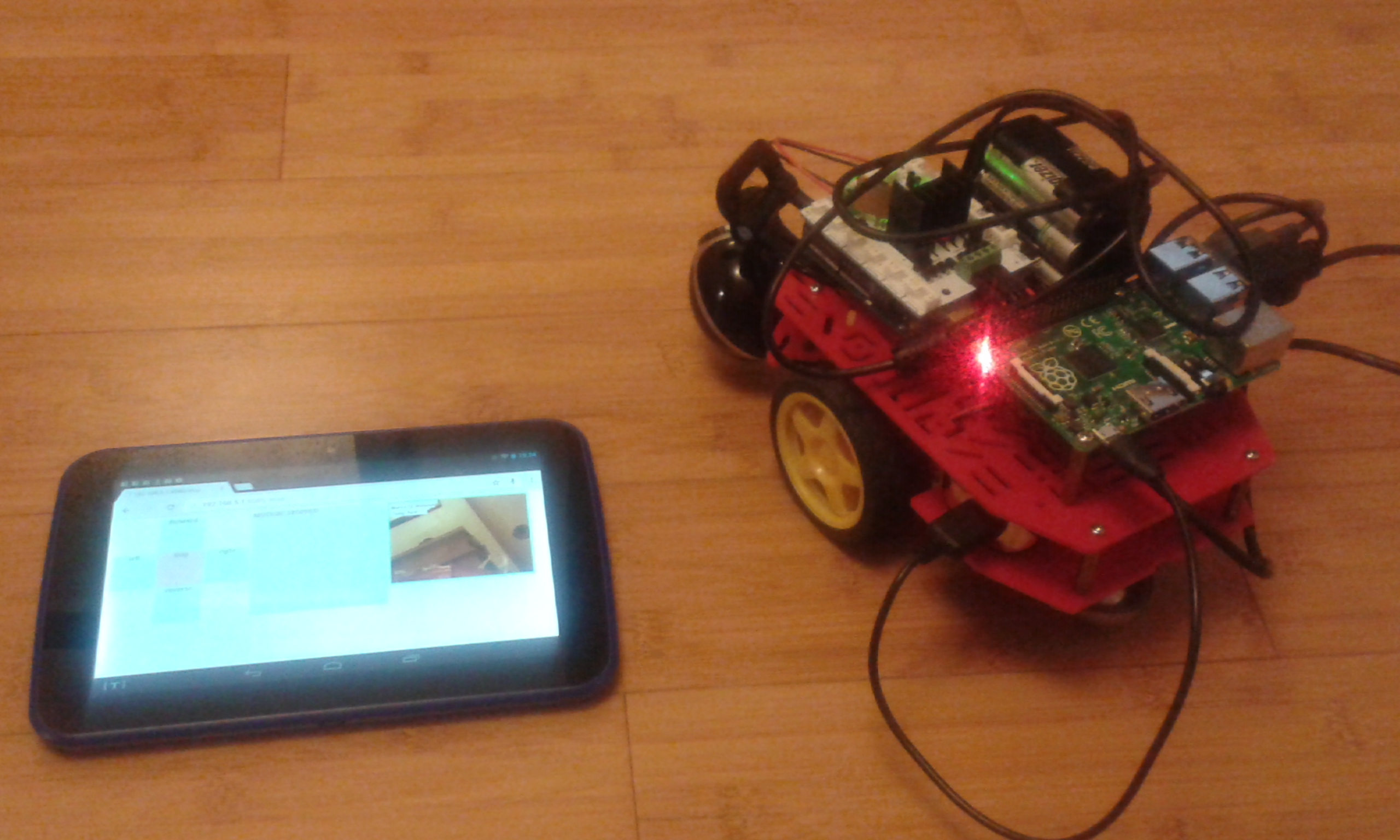 Marco 2 next to Tesco Hudl Tablet used for remote control testing.
Marco 2 next to Tesco Hudl Tablet used for remote control testing.
 And another picture showing Marco 2 next to Tesco Hudl Tablet.
And another picture showing Marco 2 next to Tesco Hudl Tablet.
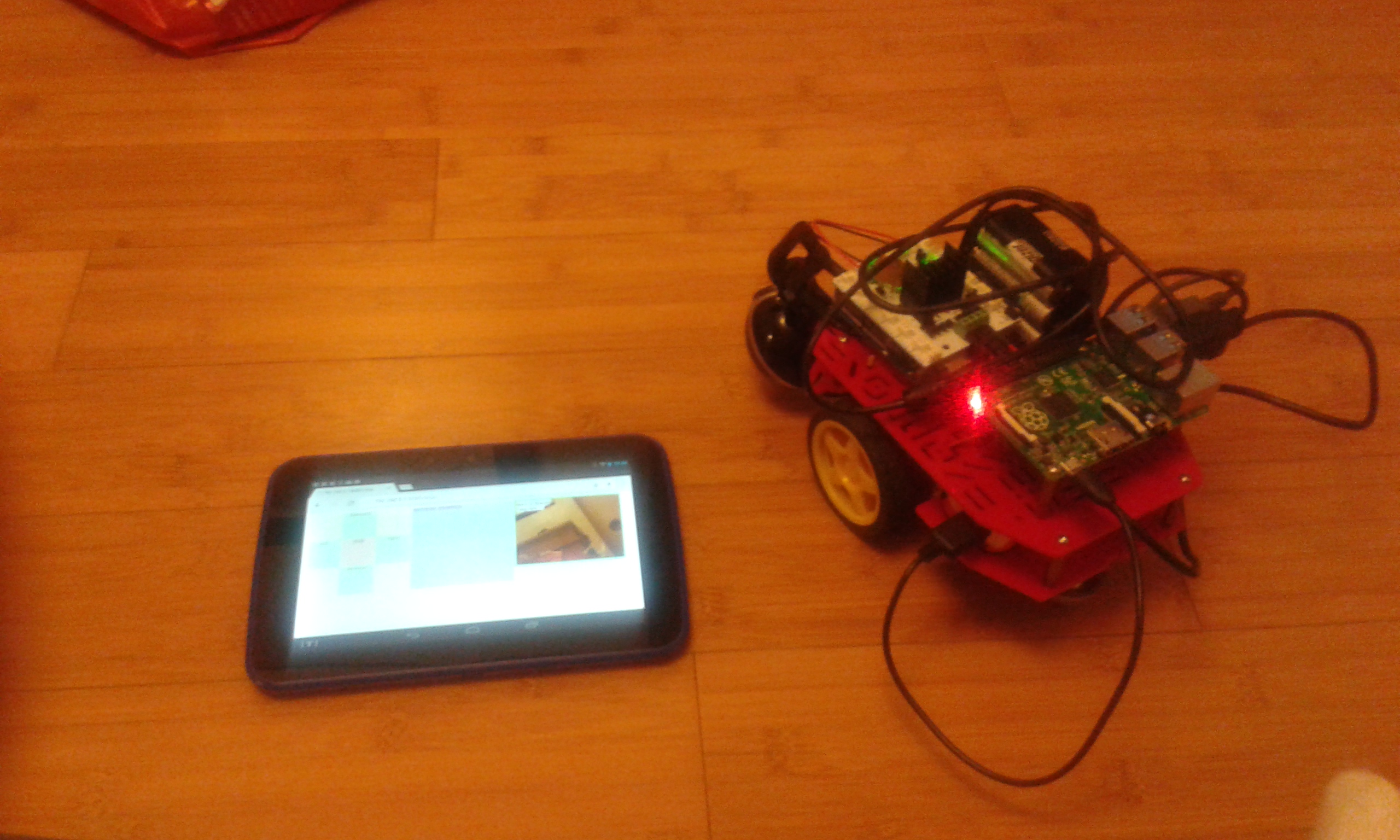
 Tablet shot showing controls (left) status information (middle) and webcam image (right).
Tablet shot showing controls (left) status information (middle) and webcam image (right).
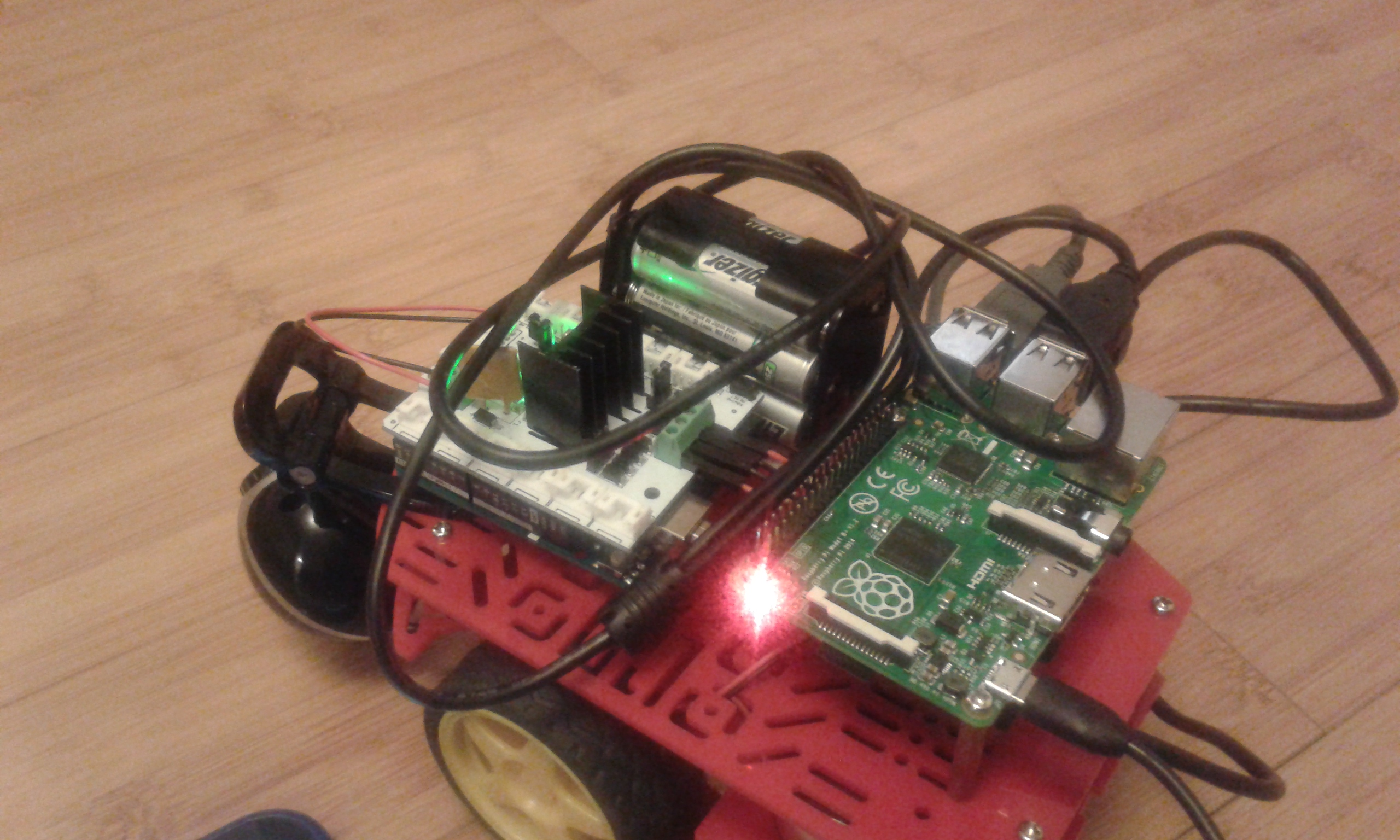
 Top down view of Marco 2 showing motor shield with Arduino Uno board sitting underneath.
Top down view of Marco 2 showing motor shield with Arduino Uno board sitting underneath.
 Rather blury view (I am not a photographer) of front mounted webcam as stated mounted upside down.
Rather blury view (I am not a photographer) of front mounted webcam as stated mounted upside down.
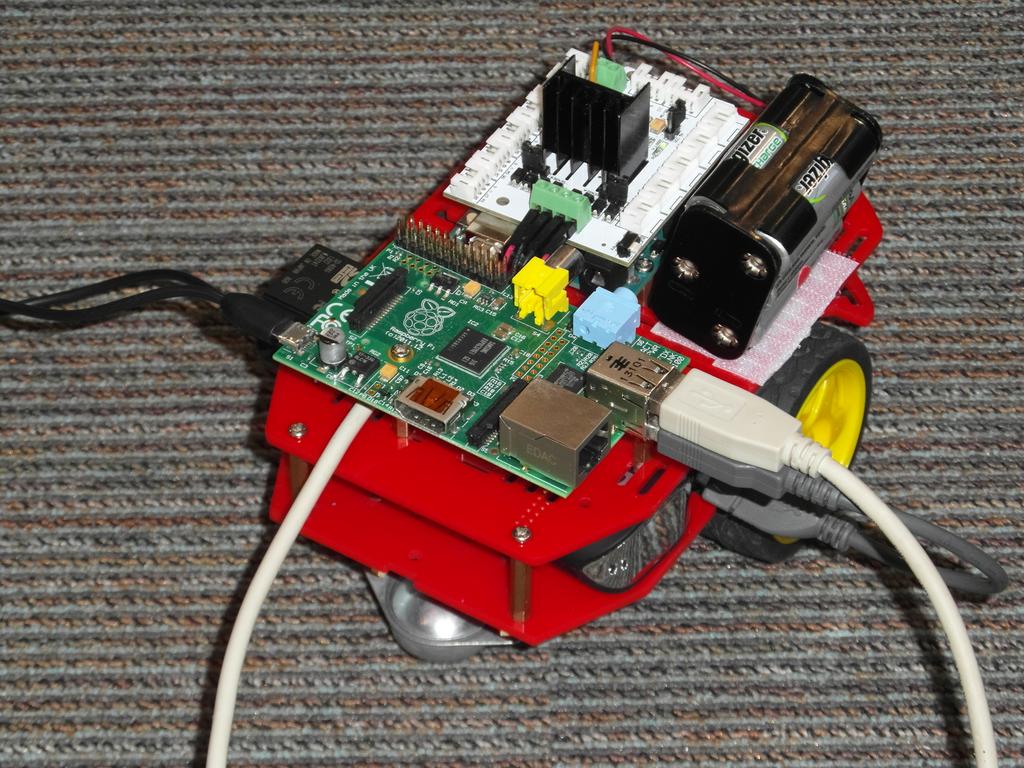
 Top Down view of Marco 2’s Pi B+ board.
Top Down view of Marco 2’s Pi B+ board.
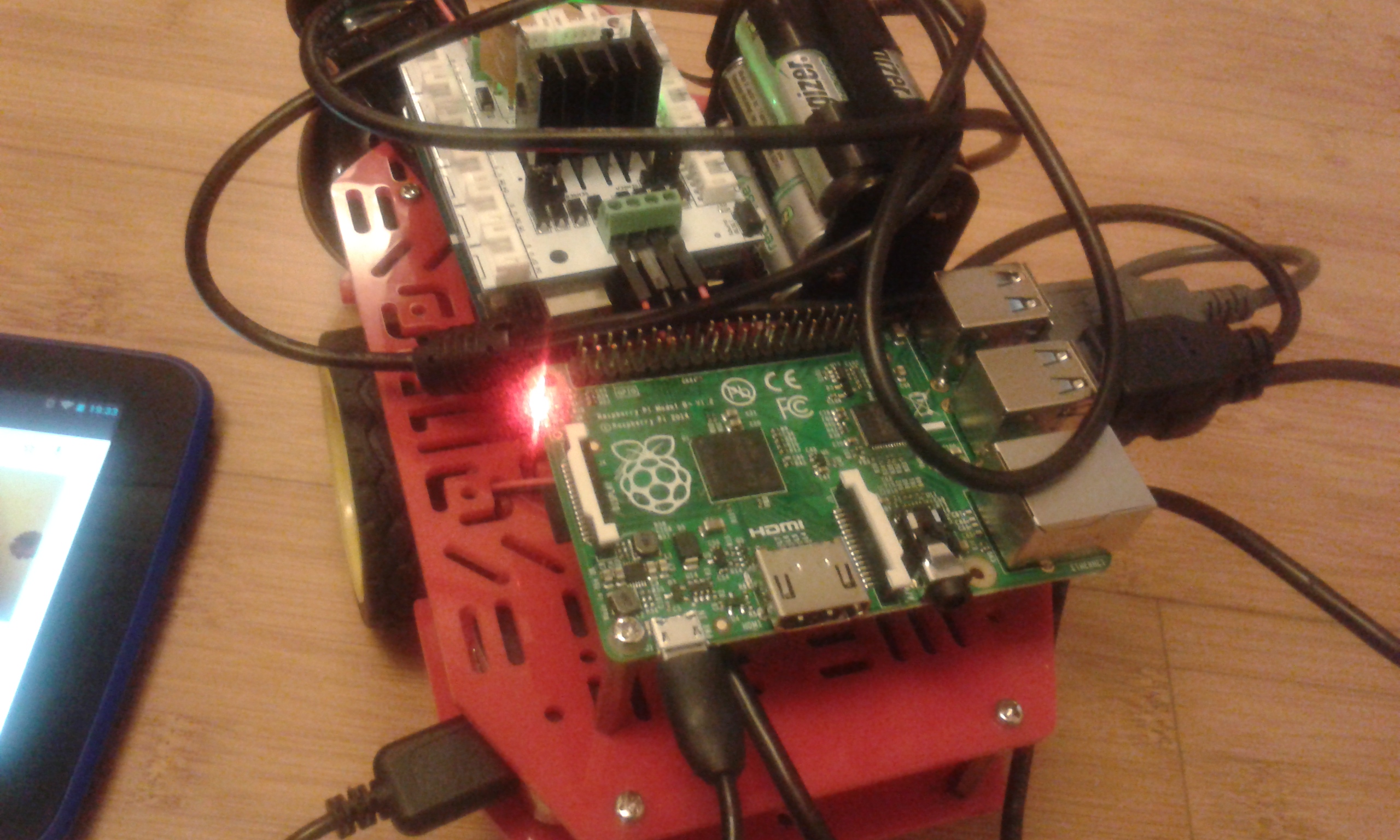 Wider angle top down view of Marco 2.
Wider angle top down view of Marco 2.
 Side view just showing battery pack (used to power the Pi B +) tucked between the controller platform base and the motor platform base.
Side view just showing battery pack (used to power the Pi B +) tucked between the controller platform base and the motor platform base.
 Another side view showing USB connectors (on the far side). The battery pack on top is used by the motor shield to provide power to the motors.
Another side view showing USB connectors (on the far side). The battery pack on top is used by the motor shield to provide power to the motors.
Exeter Pi Jam 7/2/2015
Once again another really varied Pi jam. Tom Brough has now built Marco Versiob 2.0, Those of you who have attended previous jams in both Torbay and Exeter will know marco as the robot that can follow lines on the floor.
However marco has been rebuilt and is now hosting a Raspberry Pi Model B, Arduino Uno and a Motor Controller board linked to the 2 on-board motors so that Marco can move around.
Tom has set this up so that there is a dchp server on board that gives any devices a IP address so that that device can connect to the on board web interface which allows control of the robot, forward, back, turn and stop.
One of the side effects of this is that more than one person can connect and therefore control the robot at the same time, so it does require some co-operation on the client side.
Marco will be improved further possibly by the Torbay Pi jam as Tom Bought some extra bits for it on the way home. So if you want to see more pleasew watch the video, or look at the photos if you would like to learn more, have a go and talk to Tom you need to come to the next Pi jam wiich is at Paignton Library on the 14th Feb 13:00 to 15:00.
There was the usual help and advice and more children / young people learning scratch, Python and GPIO interfacing.
I decided not to take much with me, so that I could create some video of Toms robot and later on used by time to help support other users. I have tweeted some of the photos I took of Marco early on in the Jam.
The fab lab also presented their work shop on the Raspberry pi, again to book a place on the work shop you need to contact Exeter Library and or the Fab lab for more info. Please note that the workshop is popular so you need to BOOK.
2/2/2015 – Raspberry Pi foundation Launch Raspberry Pi – V2 B+
This has some great new features
Related PI foundation blog post
http://www.raspberrypi.org/raspberry-pi-2-on-sale/
Gordon Henderson has a post too, he has also updated the wiring Pi library so that it works with the new Pi.
https://projects.drogon.net/4-pis-on-my-screen-what/
Just found this on the spirent website, it seems interesting esp as this has been brought up before. http://www.spirent.com/~/media/White%20Papers/Broadband/PAB/BYOD_The_Hidden_Threat_WhitePaper.pdf Hope this helps start a discussion and helps formulate policies where BYOD can work Seems quite an important issue, keeping the integrity and secruity of a network up to date and safe while at the same time ensuring users can bring their own deviecs and connect and keep working in or out of the office / workplace etc Paul
The Exeter Linux user group will be presenting various workshops over the coming months
Feb : Intro to C programming
March – Compiling the Linux kernel
April : TBC
May : RAD With ubuntu Quickly
These workshops will be both at the meeting but for those of you unable to make it you can join in via Google Hangout.